バーチャルステアリング式
Virtual Steering System
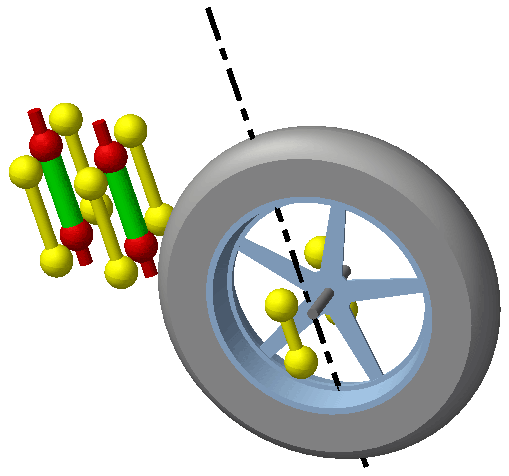
前輪の後方に前後2本の回転軸がある.これらに支持されたリンクによって動作する左右のステアリングアームによって前輪を操舵する.
このシステムは、前輪が首振り運動をする軸(上図中の一点鎖線)に具体的な部品は存在しないためバーチャルステアリング(仮想軸操舵)と命名した.
最大のデメリットは、部品点数の増加による重量の増大である.
前輪後部にリンクシステムが位置するため、ホイールベースが伸びるが、これを欠点であると言い切ることはできない.
ロワーピボットが車輪の接地点に近いことと、アームが前後方向に伸びていることによりブレーキ時の変形は極めて少ない.
また左右対称構造であること、デュープレックス式のような仮想軸の移動が無いこと、車両姿勢の変化によるジオメトリー変化が小さいことにより、挙動の変化が少なく非常に安定した特性を示す.
ハブ・車軸・ブレーキに関してはフォーク式の部品を無加工で流用可能である.
サスペンションは、重量のかさむ部品を回転軸の近くに位置させて移動距離を短くし、擬似的にバネ下重量を軽減するために、リーディングアーム式を採用した.
現在まで、販売された例はV.S.Monkeyが世界で唯一である.
|