| バーチャルステアリングとハブステアリングが同じもののように書かれていることがありますが、全く違う構造をしています.さらにELFやGTSをハブステアリングと呼んでいる記載も見かけますが、これも違います.以下にそれぞれの構造を記します.ご確認頂けるとありがたいです. それから、そもそも‥‥ なぜこのように多種のステアリングシステムが開発されているのか. その目的はひとつです.ブレーキ時のフォークのたわみから解放されることです. フロントフォークは上下方向の2本のパイプで構成されています.そのため強くブレーキを掛けると曲げの力が掛かりフォークがたわみます.これにより特性が変化したりブレーキングジャダーが発生したりします.さらにフロントフォークという基本構造を変えられないことがデザイン的に大きな制約となっています. 安全性・操作性・デザイン、いずれの観点からも、フロントフォークを廃し、前後方向に伸びるアームで前輪を支持して操舵することが理想的であると思われるため、多くの技術者たちがその理想に近付こうとしているのです. |
それぞれの方式を正確に理解するために「軸」というものの構造を確認! →確認 |
ステアリングシステム サスペンション構造は省略 |
|
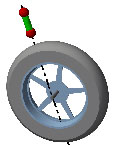 |
フロントフォーク Front Fork 車輪の上部に2つのピボットが設置されている. →詳細 |
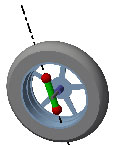 |
片持ち型 One-side Holding (just like car) ELF等に採用されている. 4輪車のダブルウイッシュボーン&キングピンと同じ構造. ハブステアリングではない. →詳細 |
 |
|
 |
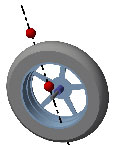
ハブステアリング Hub-center Steering Bimota Tesi等に採用されている.ハブ内部にステアリング軸が格納されているため、ハブセンターステアリングと呼ばれる. 構造上、キャスター角が小さくなってしまう. バーチャルステアリングではない. ※ウィキペディア様、記載内容の修正をお願い致します. →詳細 |
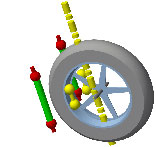 |
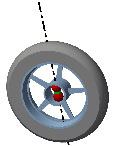
デュープレックス Duplex Steering 歴史的バイクやAUDI A8等に採用されているが、日本国内特許は羽田が取得してる.(1991年出願) 操舵時に操舵軸が移動する不完全な動作のため、モーターサイクルには適しない. 黄色で示した軸は操舵時に移動する. →詳細 |
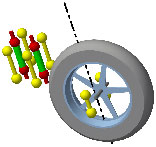 |
バーチャルステアリング Virtual Steering 1991年特許出願. 操舵軸には具体的な部品が存在しないため仮想軸操舵機構=Virtual Steering Systemと名付けた.(1997年) 仮想の操舵軸は操舵時にも移動せず、完全動作する. ハブステアリングではない. 黄色で示した軸は操舵時に移動する. →詳細 |